“探究杠杆的平衡条件”实验中,(1)首先应调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做的好处:便于在杠杆上直接测量.如发现杠杆左端偏高,则可将右端的平衡螺母向调节.(2)如图1---3次是小明同学实验的情景,实验时所用的每个钩码重均为0.5N,杠杆上刻线的间距为5cm,部分实验数据记录如中下表: 实验次数 动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm 1 1.5 10 1 2 1 20 2 10 3 1 20 1.5
2019-06-21
“探究杠杆的平衡条件”实验中,
(1)首先应调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做的好处:便于在杠杆上直接测量______.如发现杠杆左端偏高,则可将右端的平衡螺母向______调节.
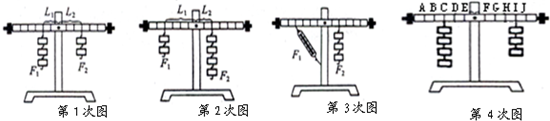
(2)如图1---3次是小明同学实验的情景,实验时所用的每个钩码重均为0.5N,杠杆上刻线的间距为5cm,部分实验数据记录如中下表:
表格中空格里应记入的数据是______;小明的第3次实验存在错误,其错误是______.
(3)如图4所示,在调节平衡后的杠杆两侧,分别挂上相同规格的钩码,杠杆处于平衡状态.如果两侧各去掉一个钩码,则______(选填“左端下降/右端下降/仍然平衡”).
(4)实验中多次测量的目的是______.
(1)首先应调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做的好处:便于在杠杆上直接测量______.如发现杠杆左端偏高,则可将右端的平衡螺母向______调节.
(2)如图1---3次是小明同学实验的情景,实验时所用的每个钩码重均为0.5N,杠杆上刻线的间距为5cm,部分实验数据记录如中下表:
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 1.5 | 10 | 1 | |
| 2 | 1 | 20 | 2 | 10 |
| 3 | 1 | 20 | 1.5 | 10 |
(3)如图4所示,在调节平衡后的杠杆两侧,分别挂上相同规格的钩码,杠杆处于平衡状态.如果两侧各去掉一个钩码,则______(选填“左端下降/右端下降/仍然平衡”).
(4)实验中多次测量的目的是______.