如图所示是某校八年级物理兴趣小组探究“杠杆的平衡条件”的实验装置. (1)实验前,应先调节杠杆两端的平衡螺母,使杠杆在未挂钩码时在位置平衡.此后在整个实验过程中(选填“能”或“不能”)再旋动两侧的平衡螺母.(2)某一实验小组得到的两组数据如表所示:实验序号动力F1/N动力臂L1/cm阻力F2/N阻力臂L2/cm122011021824这两组数据中,实验序号为的一组肯定有错误.经检查,发现是测量动力臂时读错了,动力臂的实际值与测量值相比偏(选填“大”或“小”).(3)通过此探究实验应该得出的结论是:.(4)
2019-06-21
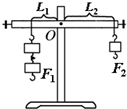
如图所示是某校八年级物理兴趣小组探究“杠杆的平衡条件”的实验装置.
(1)实验前,应先调节杠杆两端的平衡螺母,使杠杆在未挂钩码时在___位置平衡.此后在整个实验过程中___(选填“能”或“不能”)再旋动两侧的平衡螺母.
(2)某一实验小组得到的两组数据如表所示:
这两组数据中,实验序号为___的一组肯定有错误.经检查,发现是测量动力臂时读错了,动力臂的实际值与测量值相比偏___(选填“大”或“小”).
(3)通过此探究实验应该得出的结论是:___.
(4)另一实验小组的同学获得的数据如表所示:
他们得出的结论是:“动力+动力臂=阻力+阻力臂”,你认为他们的实验存在什么问题?___(只要求写出其中一点).
(1)实验前,应先调节杠杆两端的平衡螺母,使杠杆在未挂钩码时在___位置平衡.此后在整个实验过程中___(选填“能”或“不能”)再旋动两侧的平衡螺母.
(2)某一实验小组得到的两组数据如表所示:
| 实验序号 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |
(3)通过此探究实验应该得出的结论是:___.
(4)另一实验小组的同学获得的数据如表所示:
| 实验次数 | 动力F1/N | 动力臂L1/cm | 阻力F2/N | 阻力臂L2/cm |
| 1 | 4 | 5 | 5 | 4 |