在探究杠杆平衡条件的实验中,为什么要将杠杆调到水平位置?小莉在调到水平位置的杠杆上探究杠杆平衡条件时,将弹簧秤拉成了如图情况,当拉力方向与杠杆成30°角时平衡了.若每个钩码质量为标准的50g,在误差范围内,弹簧秤的示数大约是多少?(g取10N/kg)这次实验中,老师提供的弹簧秤有两种:a(0~5N,精度0.1N)b(0~50N,精度1N)你选哪种?
 在探究杠杆平衡条件的实验中,为什么要将杠杆调到水平位置?
在探究杠杆平衡条件的实验中,为什么要将杠杆调到水平位置?
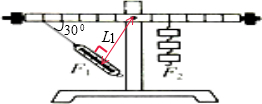
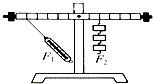
小莉在调到水平位置的杠杆上探究杠杆平衡条件时,将弹簧秤拉成了如图情况,当拉力方向与杠杆成30°角时平衡了.若每个钩码质量为标准的50g,在误差范围内,弹簧秤的示数大约是多少?(g取10N/kg)这次实验中,老师提供的弹簧秤有两种:a(0~5N,精度0.1N)b(0~50N,精度1N)你选哪种?
2019-06-21
在探究杠杆平衡条件的实验中,为什么要将杠杆调到水平位置?小莉在调到水平位置的杠杆上探究杠杆平衡条件时,将弹簧秤拉成了如图情况,当拉力方向与杠杆成30°角时平衡了.若每个钩码质量为标准的50g,在误差范围内,弹簧秤的示数大约是多少?(g取10N/kg)这次实验中,老师提供的弹簧秤有两种:a(0~5N,精度0.1N)b(0~50N,精度1N)你选哪种?